Trudna decyzja Pana Procesora
Życie po amputacji kończyn jest bardzo trudne, szczególnie w początkowym okresie po operacji. Proste, codzienne czynności, które wcześniej nie sprawiały problemów w realizacji, bez sprawnych narządów ruchu stanowią bardzo trudne zadanie. Stosowane obecnie protezy mają wiele ograniczeń, a ich używanie nastręcza dużo trudności i wzmaga wysiłek osoby niepełnosprawnej. Istnieje na szczęście metoda rozwiązania problemu, która w ostatnich latach rozwija się dość dynamicznie. Są to protezy sterowane za pomocą sygnałów biologicznych natury elektrycznej. Jednym z nich jest wytwarzany w mięśniach sygnał EMG (miopotencjał). Ten artykuł został poświęcony opisowi, w jaki sposób wykorzystywać miopotencjały do sterowania urządzeń, na przykładzie protez rąk.
Miopotencjał w mięśniach
Już w czasach starożytnych myśliciele wspominali o dziwnych rybach (węgorzach elektrycznych), które potrafią wytworzyć niezwykły „wstrząs” wokół siebie. Wieki później naukowcy wiedzieli już, że „wstrząsem” tym jest napięcie elektryczne i że nie tylko węgorze elektryczne potrafią je wytworzyć, ale także każdy organizm posiadający mięśnie. Elektryczność jest bowiem nieodzownym atrybutem komórek mięśniowych, który towarzyszy każdemu organizmowi żywemu.
Ale nie obawiajcie się - mięśnie ludzkie wytwarzają bowiem potencjał o bardzo małej wartości. Wartość ta jest rzędu miliwoltów, więc nie odczuwamy tego napięcia. Powoduje to niestety także trudności z odczytem owego sygnału, potrzebne są bowiem bardzo czułe instrumenty, aby poprawnie rejestrować tę wartość. Napięcie to zwane jest sygnałem elektromiograficznym (EMG) lub miopotencjałem, a bardzo czułe „woltomierze” przystosowane do rejestracji owego sygnału nazywamy aparatami EMG lub elektromiografami.
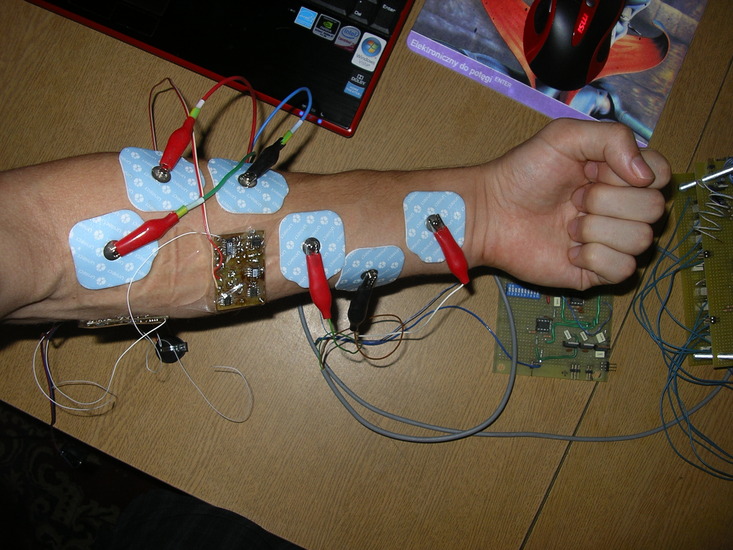
Istnieje zatem druga możliwość w stosunku do protez kosmetycznych i mechanicznych. Można zastosować bardziej zaawansowane protezy sterowane miopotencjałami. Odczyt sygnałów z powierzchni skóry jest dla pacjentów jednym z najwygodniejszych sposobów sterowania z użyciem sygnałów EMG. Początkowo wykorzystywałem elektrody do badań elektrokardiograficznych (EKG), ale ostatnio opracowałem własne, zminiaturyzowane elektrody aktywne.
Przez wiele lat badacze sądzili, że sygnał EMG jest szumem, z którego praktycznie nic nie da się wywnioskować. Dopiero prace Inmana w latach czterdziestych XX wieku, w których związał on amplitudę sygnału EMG z siłą mięśni, przyczyniły się do znacznego rozwoju elektromiografii. W celu badania miopotencjałów stosuje się zazwyczaj duże, wielokanałowe elektromiografy, gabarytami odpowiadające obudowie komputera PC. Istnieją także zminiaturyzowane wersje tych urządzeń i to one są zazwyczaj wykorzystywane w protetyce. Sygnał, odczytany na ekranie komputera lub oscyloskopu, ma postać szybkozmiennych impulsów, sprawiających wrażenie szumu. Odpowiednie przetworzenie tego sygnału, aby mógł zostać użyty do sterowania urządzeń, nie jest zadaniem trywialnym. Powstały jednak odpowiednie techniki, za pomocą których można się starać tak przetworzyć miopotencjał, aby było możliwe sterowanie protezami.
Techniki sterowania
Z przebiegu sygnału EMG można odczytać szereg interesujących rzeczy. Ogólnie świadczy on o aktywności mięśni. Gdy mięśnie są napinane, sygnał ten narasta. Zmienia się także jego faza oraz inne parametry. Te właściwości stanowią główny powód wykorzystywania miopotencjałów do sterowania urządzeniami. Sygnał EMG ma specyficzny przebieg, gdy mięśnie są naprężone, jego maksimum nie utrzymuje się cały czas. W czasie skurczu mięśni, wartość amplitudy sygnału rośnie, po czym spada. W zależności od tego, czy naprężenie minie, czy też mięśnie będą nadal napięte, jego średnia wartość spadnie do wartości początkowej lub będzie się utrzymywać na większym poziomie.
W nowoczesnych protezach sygnał jest analizowany przez specjalnie w tym celu zaprogramowane procesory, które sterują również aktuatorami protezy, np. silnikami elektrycznymi czy mięśniami pneumatycznymi. Można sobie zatem wyobrazić, że mikroprocesor jest uzdolnionym profesorem matematyki, który analizuje sygnał i na jego podstawie wydaje swojemu asystentowi (silnikowi) polecenia, w jaki sposób ma zostać poruszona proteza.
Do najprostszych algorytmów sterowania należy zaliczyć manewrowanie na podstawie aktualnej amplitudy sygnału. W najprostszych przypadkach polega ono na tym, że silnik obraca protezę o określony kąt w zależności od tego, jaką wartość osiągnie sygnał. Można byłoby np. założyć, że gdy sygnał przekroczy wartość x, proteza obraca się np. o 20 stopni, a po przekroczeniu wartości 3x - o 60 stopni. Możliwe są także płynne przedziały wartości aktywacji, co spowodowałoby, że proteza mogłaby osiągnąć praktycznie dowolne położenie. Jednak nie jest to najlepszy pomysł, ze względu na to, że kontrola wartości sygnału EMG jest bardzo trudna, więc ruch protezy nie zawsze byłby zgodny z intencją pacjenta.
Inną ciekawą techniką sterowania za pomocą miopotencjałów jest przyjęcie kilku progów aktywacji ruchu i wprowadzenie dodatkowego kodowania. Załóżmy np., że brakuje nam ręki poniżej stawu łokciowego. Miopotencjał zbieramy z trzech mięśni (bicepsa, tricepsa i klatki piersiowej). Chcemy używać mięśni klatki piersiowej do otwierania i zamykania chwytaka. Ale pojawi się problem, ponieważ mięśnie klatki piersiowej służą także do wykonywania innych ruchów, możemy zatem mieć do czynienia z sytuacją, w której przez pomyłkę będziemy otwierać chwytak.
Jednakże możemy łatwo ustrzec się przed tymi niepożądanymi zachowaniami, np. przez zaprogramowanie mikrokontrolera w ten sposób, że przekaże on do silnika polecenie, nakazujące otworzenie chwytaka dopiero wówczas, gdy pacjent trzykrotnie w ciągu 2 sekund napręży mięsień klatki piersiowej. W ten sposób jeden mięsień może nadal pełnić swoją dawną funkcję, ale także zyskać nowe znaczenie.
Składając podstawowe techniki opisane powyżej, można stworzyć algorytm sterowania za pomocą sygnałów EMG protezy o wielu stopniach swobody (bardzo ruchliwej). Sygnały do sterowania można pobierać z różnych części ciała, np. w przypadku protezy nogi są to zazwyczaj mięśnie pośladków i dolne mięśnie pleców, w przypadku ręki – mięśnie klatki piersiowej i najszerszy mięsień grzbietu. U pacjentów, którzy mieli szanse testować tego typu zaawansowane protezy, obserwuje się ciekawe zjawisko, polegające na tym, że mózg tak skutecznie uczy się sterować daną protezą z zastosowaniem innych mięśni, iż po pewnym czasie pacjent odruchowo ich używa. To tak, jakby mięśnie pleców od zawsze były odpowiedzialne za otwieranie dłoni.
Gdyby nie natura sygnałów EMG, na tym mógłbym skończyć tę opowieść, ale pojawia się pewien problem. Często daje o sobie znać niestacjonarność miopotencjałów, czyli ich częsta zmiana, co powoduje, że nie zawsze mikroprocesor decyduje o takim ruchu, jaki chciałby wykonać pacjent. Powyższe algorytmy mogą być jedynie skuteczne w mało ruchliwych protezach, a sterowanie to jest niedoskonałe. Należy zatem szukać skuteczniejszych algorytmów sterowania, które będą odporne na występujące zmiany sygnałów.
A może model matematyczny?
Zapewne niejednemu czytelnikowi zaświtała w głowie myśl: czy można stworzyć matematyczny model mięśnia, w którym wielkością wejściową byłby miopotencjał, i na jego podstawie obliczać położenie, w jakim powinny się znaleźć poszczególne części protezy? Podobnie jak na podstawie wzoru P = a2 można, znając długość boku kwadratu, obliczyć jego pole. Pomysł wywodzi się z podstawowych technik sterowania i w przypadku części systemów jest to możliwe. Mięsień jednak to skomplikowany układ i nie daje się łatwo ująć we wzory matematyczne.
Sygnały EMG są sygnałami niestacjonarnymi w wąskim zakresie, istnieje zatem szansa, iż rozdzielając część deterministyczną od czysto losowej uda się tego dokonać. Tak właśnie zrobiłem i wyznaczyłem model matematyczny. Był on bardzo skomplikowany, ale niestety nie odwzorował w pełni rzeczywistego mięśnia, dlatego że w modelu została zastosowana za mała liczba parametrów, a część z nich została niedokładnie wyznaczona, więc był on prawidłowy tylko dla jednego pacjenta, określonego mięśnia, dla danego aparatu EMG itp. W dodatku niektóre parametry sygnału EMG ciągle się zmieniają. Mają na nie wpływ: stan zmęczenia mięśni, charakterystyka otoczenia, wpływ innych sygnałów biologicznych itp. Dlatego model, który odwzorowywał dany stan mięśnia w momencie przeprowadzania eksperymentów, obowiązywał pewien czas z dość dużą dokładnością, a później jego dokładność zaczęła spadać. Oczywiście nie możemy się posługiwać takim układem sterowania w protetyce, bo mielibyśmy zbyt małą pewność, iż nie wypuścimy np. czajnika z ręki, posługując się protezą sterowaną w ten sposób.
Czy zatem jest możliwe stworzenie bardzo dokładnego modelu matematycznego, który będzie przetwarzał miopotencjał na właściwy ruch? Prawdopodobnie jest to możliwe, ale byłby to model bardzo skomplikowany, liczba zmiennych sięgałaby około 35. Występowałyby w nim pochodne co najmniej trzeciego rzędu. Jeszcze nikomu nie udało się tego zrobić. Zapewne ktoś kiedyś tego dokona, ale do sterowania przydadzą się trochę szybsze procesory, których jeszcze nie ma na rynku. Posługując się współczesną elektroniką, pacjent musiałby nosić na plecach aparaturę o wadze kilkudziesięciu kilogramów.
Chaos w sieci
Istnieją jednak inne techniki, które lepiej poradziłyby sobie z zagadnieniem analizy sygnałów EMG. Są to różne metody sterowania adaptacyjnego. Jedną z najskuteczniejszych metod adaptacyjnych, które zostały wykorzystane przez autora, były metody sztucznej inteligencji ze szczególnym naciskiem na sztuczne sieci neuronowe (SSN). Tego typu sztuczna sieć neuronowa jest w stanie nauczyć się określonego zachowania analogicznie jak nasze mózgi, które składają się z sieci neuronowych o podobnym zachowaniu. Ale, co najważniejsze, sieć taka jest w stanie przystosować się do zmiennych parametrów sygnału.
Rozmiar zbudowanej przeze mnie SSN był dobierany dynamicznie w zależności od liczby elektrod. Sieć wymagała wstępnej inicjalizacji, w trakcie której uczyła się parametrów układu np. rozmieszczenia elektrod względem siebie czy charakterystyki danego pacjenta itp. Wykorzystywałem w czasie swoich eksperymentów cztery elektrody, ale można przewidywać, że gdyby ich liczba była większa, dokładność decyzji podejmowanych przez sieć wzrosłaby znacznie.
Nie trzeba nikogo przekonywać, że zjawiska i procesy chaotyczne są wszechobecne i powszechne w przyrodzie. Nie należy się zatem dziwić, że występują one także w sygnałach EMG. Przebieg tych sygnałów jest bardzo wrażliwy na początkowe rozwiązania, można także zaobserwować zmiany stateczności rozwiązań (bifurkacje). Z tego powodu zainteresowałem się ostatnio teorią chaosu i bifurkacji. Ocenia się, że zastosowanie tych teorii do wstępnej analizy sygnałów w połączeniu z poprzednią metodą skuteczniej odwzoruje intencje pacjenta.
Rozwiązaniem, które prawdopodobnie również przyczyniłoby się do zwiększenia dokładności dekodowania miopotencjałów na konkretne położenie, jest częściowa kontrola nad procesami sieciowymi w SSN w ten sposób, aby poszczególne współczynniki ewoluowały w różnym zakresie. Te nowe techniki analizy sygnałów są obecnie przeze mnie badane.
Sterowanie protezami z użyciem sygnałów EMG stanowi bardzo interesującą alternatywę dla konwencjonalnie sterowanych protez układu ruchowego człowieka. Obecnie są już wykorzystywane protezy oparte na detekcji i sterowaniu sygnałami EMG. Korzystają one przede wszystkim z najprostszych algorytmów. Wykorzystanie bardziej złożonych technik sterowania jedynie nieznacznie zwiększyłoby koszty takiej protezy, za to różnica w funkcjonalności byłaby znaczna. Wykorzystując nowe algorytmy opisane w tym artykule, będzie można sterować protezami o większej liczbie stopni swobody, które polepszą życie pacjentów.

Komentarze
Tylko artykuły z ostatnich 12 miesięcy mogą być komentowane.
Fajne pomysły. Również swego czasu, u nas w instytucie pracowaliśmy nad tym zagadnieniem, ale rezultaty były marne. Dobrze, że ktoś jednak zrobił większe postępy. Pozdrawiam Panie Arturze.